Async RL 是否已解决:policy lag、IS 偏差与后训练系统边界
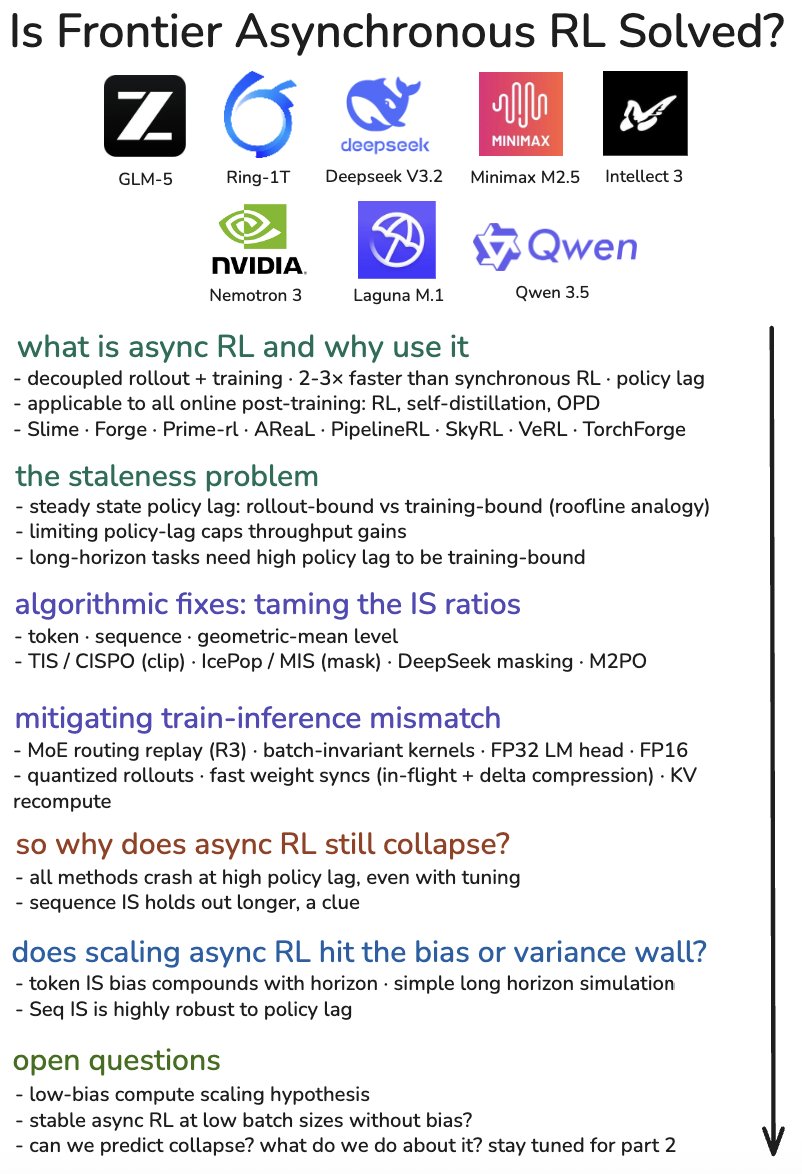
这篇文章的关键不是宣布异步 RL 已经成熟,而是把大模型后训练中的吞吐、stale rollout、importance sampling、数值一致性和长 horizon 扩展放到同一个判断框架里:系统工程可以把 train-inference mismatch 压低,但高 policy lag 下的 estimator 偏差才是更硬的上限。
核心判断
这条 thread 和 blog 最值得记录的 insight 是:异步 RL 并不是“把生成和训练并行起来”这么简单。它把 on-policy RL 的干净假设换成了吞吐更高、但数据更旧的 off-policy 训练问题。
我的判断:frontier async RL 还没有被解决。当前系统侧的 weight sync、batch-invariant kernel、MoE routing replay、FP32 LM head、量化 rollout 等手段能减少训练端和推理端不是同一个 policy 的问题;但只要 policy lag 被推高,rollout trajectory 仍然来自旧策略,importance sampling ratio 的分布仍然会极端化。真正未解决的是高 policy lag、长 horizon、有限 batch 下的低偏差训练。
这也是作者为什么把主题从 infrastructure survey 推向 estimator scaling。工程系统可以把错配噪声降低;但如果 estimator 自身是高 bias 的,compute 上去以后不会自动变正确,只会更稳定地优化错目标。反过来,低 bias 方法低 compute 时可能因为 variance 暴露得更明显而显得吃亏,却有机会随着 batch size 和 variance control 扩展。
问题背景
大模型 reasoning、tool-use 和 agentic 任务把 RL 的采样成本推高。同步 RL 的每轮训练必须等当前 policy 完成 rollout,长输出会让训练 GPU 空等最慢的 trajectory。
采样和训练在一个严格循环里,必须先用当前 policy 生成样本,再进入优化。长 horizon 让 rollout latency 主导 step time。
rollout worker 持续生成,trainer 持续更新,中间用 trajectory buffer 和周期性 weight sync 解耦。吞吐提升来自不再让两端互相等待。
trainer 更新时看到的样本可能来自若干步之前的 inference policy。此时训练目标不再天然 on-policy,需要处理 off-policy mismatch。
作者把 policy lag 定义为训练 policy 相对 inference policy 领先的优化步数。K 等于 0 时是完全 on-policy;K 越大,trajectory 越旧。最直接的工程控制是设置最大 lag,例如 FIFO 窗口或丢弃超过阈值的样本,但这会直接限制异步 RL 的吞吐收益。
机制拆解
异步 RL 的核心机制可以拆成三个变量:rollout latency、training step time、以及 rollout / training 资源比例。它们共同决定系统自然积累的 steady-state lag。
生成端持续产出 trajectory,训练端持续消费 buffer。系统不再等待每一批样本完全结束后才更新。
训练端消费样本时,当前参数已经不同于采样时的参数。policy lag 越高,分布差异越大。
训练目标用当前 policy 与行为 policy 对同一 trajectory 的概率比值做重加权。ratio 越极端,梯度方差和稳定性问题越严重。
TIS、CISPO、MIS、IcePop、DeepSeek-style masking、M2PO 等方法都在重塑或丢弃极端 ratio。
关键 insight:限制 Kmax 可以稳定训练,但会把系统重新推回 rollout-bound;放开 Kmax 可以接近异步吞吐上限,但 stale trajectory 会让 estimator 崩。长 horizon 任务恰好同时需要异步吞吐和更高 policy lag,所以它是这个矛盾最尖锐的场景。
系统错配
作者把稳定性问题拆成两类:算法层面的 policy lag,以及系统层面的 train-inference mismatch。后者即使在 K 很低时也会出现,因为 rollout engine 和 training engine 往往不是同一套数值路径。
| 系统修补 | 它在修什么 | 为什么仍不够 |
|---|---|---|
| MoE routing replay | 记录 rollout 时的专家路由,在训练时复现,避免相同权重下专家选择不同。 | 它减少数值 / 路由错配,但不能让旧 policy 生成的数据变成新 policy 数据。 |
| Batch-invariant kernels | 让不同 batch size、并行策略或归约顺序下的 log-prob 更一致。 | 它解决 engine parity,不解决 policy drift。 |
| FP32 LM head / FP16 pipeline | 降低低精度舍入对 log-prob 和 IS ratio 的放大效应。 | 它压低测量噪声,但 IS ratio 极端化仍来自分布差异。 |
| Quantized rollout | 缩短生成时间,提高 rollout throughput,并配合准确 log-prob 或 TIS。 | 它提升速度,但若量化改变 policy,需要额外校正。 |
| Fast weight sync | 更快把训练权重或 delta 推到 inference 端,降低 lag。 | 它缓解 lag,但不能证明高 lag 下训练目标仍正确。 |
这组系统修补的共同价值是让 rollout policy 和 training policy 尽量指向同一个对象。它们是必要条件,却不是充分条件。只要系统为了吞吐主动允许 policy lag 存在,算法侧仍必须回答:如何在旧 trajectory 上估计新 policy 的梯度。
Estimator 分歧
作者最强的判断集中在 token-level IS 和 sequence-level IS 的分歧上。这里的问题不是哪个 trick 更平滑,而是哪一个 estimator 在 async long-horizon 场景下仍指向正确目标。
按每个 token 的概率比值做修正,方差较低,和 PPO / GRPO 的常见形式更接近。在 policy drift 小、连续策略足够近时,它可以作为实用近似。
按整条 trajectory 的概率比值做修正,更接近 off-policy 目标本身。代价是长序列下 ratio 方差可能非常高,小 batch 时尤其难用。
试图在 token 与 sequence 之间折中,用 token ratio 的几何平均控制尺度。作者的 simulation 显示它在长 horizon 下更像 token IS,而不是可靠中间地带。
通过 clip 或 mask 极端 ratio 降低 variance。它能让小 batch 更稳,却把 bias 写进目标;当 compute 增长时,bias 可能成为上限。
低偏差 compute scaling hypothesis:低 bias 方法低 compute 时暴露更多 variance,看起来不划算;但它保留了正确目标,因此更可能随 batch、compute 和 variance control 扩展。高 bias 方法小规模更稳,但扩展时会撞上 bias ceiling。
这对工程实践的启发很直接:不要只用小 batch、小 horizon 的稳定性判断一个 async RL 修补是否可扩展。低方差方法在早期曲线更漂亮,不等于它在高 compute 或长任务上有更高上限;sequence-level 方向早期更吵,也不等于它不值得做 variance control。
术语解释
异步强化学习训练形态:rollout 和 training 不再严格串行,而是通过 buffer、权重同步和版本管理并行运行。
训练 policy 相比生成样本的 inference policy 领先的优化步数。lag 越大,trajectory 越 stale。
rollout-bound 指 trainer 等样本,吞吐受生成端限制;training-bound 指 buffer 持续有样本,训练端成为主瓶颈。
当前 policy 与行为 policy 对同一 token 或 trajectory 的概率比值,用于在 off-policy 数据上重加权梯度。
训练端和推理端因为精度、kernel、并行策略、MoE 路由、tokenization 或权重版本不同,导致 log-prob 或行为不一致。
长 horizon 下 trajectory-level 概率比值容易随 token 数累乘而方差爆炸;这正是 sequence IS 难用但目标更干净的根源。
边界与风险
这篇 blog 的价值在于提出一个清晰的 async RL landscape 和 estimator scaling 判断,但它还不是最终答案。
作者整合了多个 lab 的报告和框架经验,也给出高 lag 实验与 simple horizon simulation;但不同模型、任务、reward、inference engine 的外部复现仍关键。
它低 bias,但 variance 高。小 batch、稀疏奖励、极长轨迹下,如果没有更好的 variance control,训练可能先被噪声击穿。
即使 estimator 更正确,MoE routing、kernel nondeterminism、LM head 精度、weight sync 这些工程错配仍会污染 log-prob 和 reward credit。
因此更稳妥的判断是:async RL 已经是 frontier post-training 的主流系统方向,但“高 policy lag 下的可扩展低偏差训练”仍是开放问题。下一阶段真正有价值的工作,可能不是再发明一个 mask,而是能在训练中诊断 estimator 已经偏离、并在 collapse 前动态调整 batch、lag、truncation 或 estimator 形态。
证据边界与资料索引
本页基于目标 X thread、作者链接的长文、thread 配图和评论区问题整理。X 公开页面有时只返回部分内容,因此长文内容以作者个人站页面为准。
- X 主帖:Luke J. Huang 发布的 “Is frontier asynchronous RL solved?” thread。主帖时间为 2026-06-01 18:04:43 UTC,包含 blog 摘要、配图和后续 takeaways。
- 作者长文:Is Frontier Asynchronous RL Solved?。正文覆盖 async RL landscape、policy lag、IS ratio、系统错配、sequence/token estimator 对比和开放问题。
- 短链指向:thread 中的 blog 短链指向作者个人站页面;另一个短链指向主帖图片页。
- 验证边界:未独立复现实验,结论以作者长文与公开 thread 为依据;X 公开页面只稳定返回部分内容,因此不作为唯一正文依据。