EqR 与 Neural Attractors:从 Feedforward 到 Iterative Reasoner
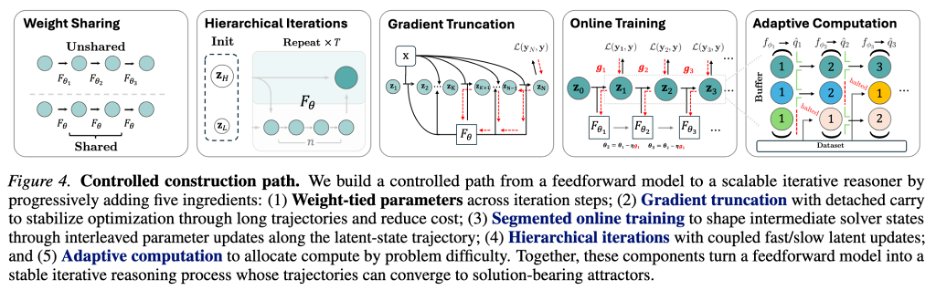
这条 X side-post 的核心不是“Sudoku 上又刷了一个分数”,而是在受控任务里拆解一个更基础的问题: 为什么同样的 layer-eval 预算,weight tying、online training、hierarchy 和 learned halting 会把一个几乎只会记忆的前馈模型,变成可以随 test-time compute 继续收敛的迭代推理器。
真正的问题:不是“多跑几层”,而是“多跑是否会向正确状态收敛”
一个前馈模型可以堆更多不同参数的层,一个 weight-tied 模型则反复应用同一个 update rule。两者在计算量上可能相近,但归纳偏置完全不同:前者像一次性函数逼近,后者像在 latent space 里运行一个求解器。
论文 Table 1 和 side-post 都显示,4/16/64-layer feedforward 在 Sudoku-Extreme 上只到 1.8/2.1/2.6%,Maze 为 0.0%。这说明单纯增加非共享层数没有学到可泛化的约束求解过程,更像在小训练集上记忆或拟合表面模式。
权重共享后,模型不再是 \(F_L \circ \cdots \circ F_1(x)\),而更接近 \(z_{k+1}=f_\theta(z_k;x)\)。这个形式让“更多 test-time compute”有了明确对象:不是再发明新层,而是继续运行同一个 latent solver。
如果正确解附近没有稳定 basin,更多迭代不会创造正确性;如果错误解是低 residual attractor,更多迭代反而会更稳定地错。EqR 的核心就是让模型的内部 attractor landscape 与任务 metric landscape 对齐。
“低 residual”只表示 \(z\) 接近 \(f_\theta(z;x)\) 的固定点或低变化区域,不自动表示答案正确。只有在局部稳定、attractor 本身正确、输出 margin 足够时,residual 才能作为 correctness proxy。论文附录把这个条件写得很清楚,所以不能把 EqR 简化成“残差越小必然越对”。
Attractor 视角:EqR 到底在优化什么
论文把 iterative reasoner 写成输入条件化的 latent dynamical system。给定输入 \(x\),模型维护 latent state \(z_k\),每一步用同一个参数化算子更新:
如果推理过程真的学成了“求解器”,那么它应该把不同初始状态的轨迹推向某些稳定状态 \(z^\star\)。EqR 把这些稳定状态称作 task-conditioned neural attractors:
增加 depth \(D\) 等价于对同一个初始状态继续应用 update rule。它只有在轨迹已经进入有用 basin 后才可靠:此时更多迭代会降低 fixed-point residual,并让 decoded output 更接近正确解。
增加 breadth \(B\) 是从多个随机初始化或随机路径出发,覆盖更多 attractor basin。EqR 的主张不是 majority vote,而是选择最终几步平均 residual 最小的轨迹;这个选择只有在 residual 与 correctness 已经重新对齐时才有效。
如果一个 iterative model 的 residual 随 depth 降低,但 exact accuracy 不升反降,说明它可能只是更稳定地进入了 spurious attractor。此时问题不在“推理步数不够”,而在训练阶段没有塑造好 attractor landscape。
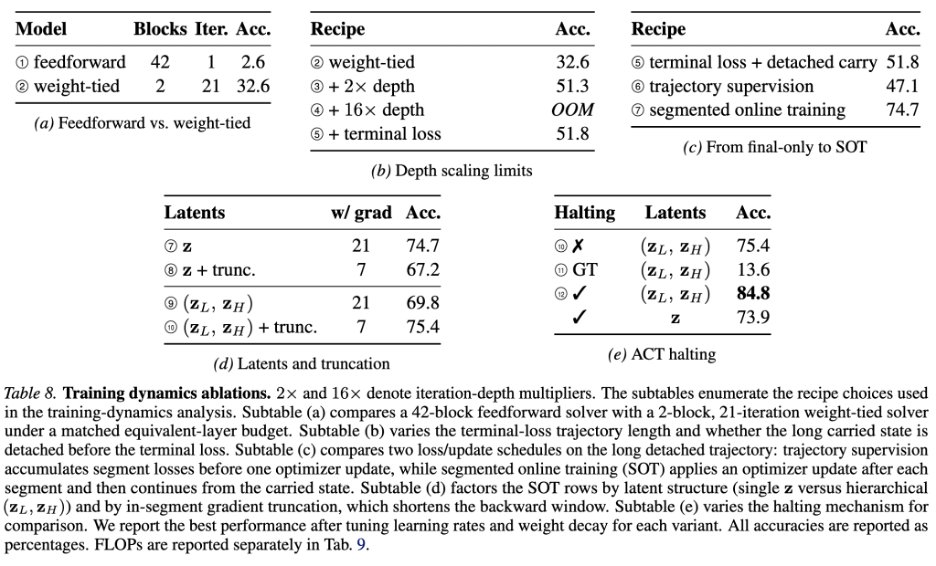
从 2.6% 到 84.8%:side-post 拆开的五个选择
用户给出的 side-post 最有价值的地方,是它没有只展示最终 EqR,而是拆解“loop model 如何先变得可训练、可泛化”。这条路径的每一步都对应一个具体的动力系统问题。
| 阶段 | Sudoku-Extreme exact acc. | 做了什么 | attractor 解释 |
|---|---|---|---|
| Feedforward | 2.6% | 64-layer 或 matched layer-eval 的一次性前馈预测器。 | 没有显式 latent solver 结构;增加层数主要增加拟合容量,不保证形成可重复收敛的状态转移。 |
| Weight tying | 32.6% | 把少量可训练 block 反复应用到 latent state。 | 引入可迭代的 update operator,模型开始具有“同一规则反复修正状态”的能力。 |
| Segmented online training | 74.7% | 长轨迹被切成 segment;模型沿轨迹前进时交替做 latent update 和 parameter update。 | 避免只在长 rollout 末端一次性回传,让学习信号跟随模型当前能到达的状态;相当于逐段把可达 basin 修正到更有用的位置。 |
| Hierarchy | 76.5% | 加入不同频率更新的高/低层 latent state。 | 不是独立魔法开关。论文附录显示 hierarchy 的收益强依赖 truncation 与 halting 训练方式,说明架构和优化动态耦合。 |
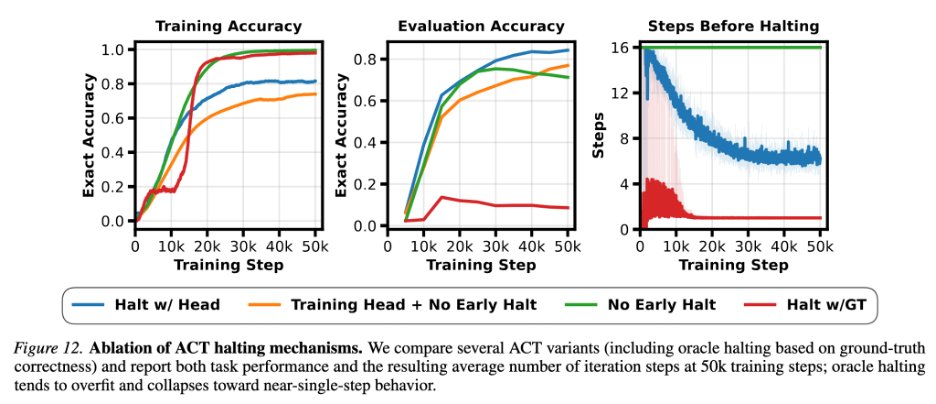
| ACT training | 84.8% | 加入 learned halting head,让模型学习什么时候停止或继续。 | learned halting 不只是省推理算力,也改变训练动态;外部 verifier/oracle halting 反而可能让模型走向捷径和记忆。 |
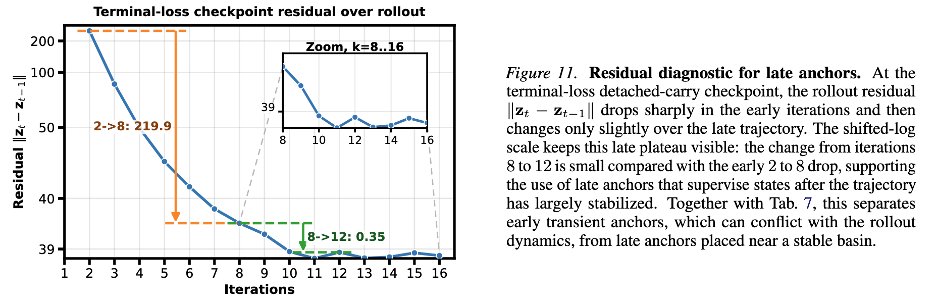
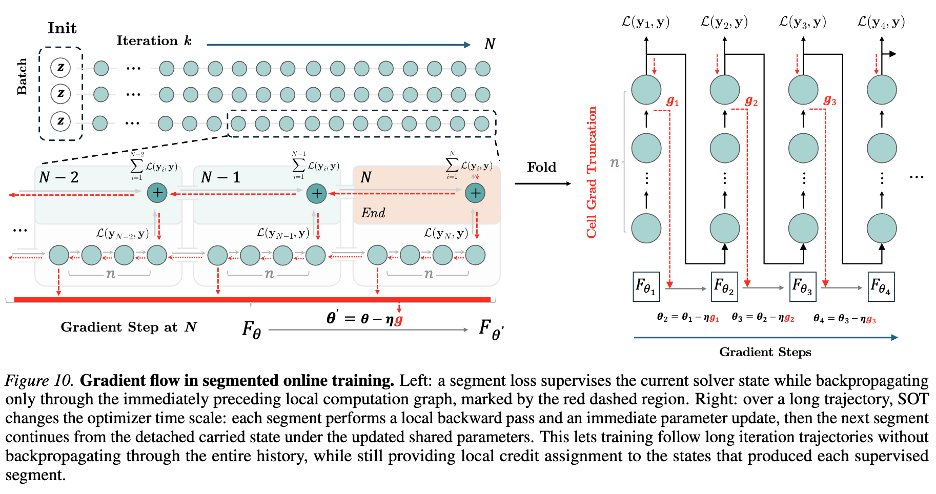
长轨迹全量反传既贵,也会让许多 recurrent Jacobian 串联,梯度条件数变差。更重要的是,轨迹上不同时间点的状态语义不同:早期状态还没进入 basin,晚期状态更接近候选 attractor,把它们同等监督会混合可靠与不可靠梯度。
side-post 中最反直觉的消融是 external verifier halting 只有 13.6%,learned ACT 到 84.8%。这说明“知道正确答案时停”给了模型一个外部捷径;模型没有学会内部收敛信号,只是依赖标签侧停止规则,泛化反而被破坏。
论文证据:EqR 如何把 scaling ceiling 推高
主论文在 side-post 的训练路径之外,进一步提出两个 landscape-shaping intervention:randomized state initialization 和 path stochasticity via noise injection。它们不是为了让模型更随机,而是为了让正确 attractor 更可达、更稳定、更适合 depth/breadth scaling。
训练时不再使用固定 latent 初始状态,而是采样 \(z_0\sim\mu_0(\cdot|x)\)。这扩大模型见过的初始状态区域,减少训练时单一路径与测试时多 restart 之间的 mismatch,并鼓励不同路径对同一任务收敛到一致输出。
每一步更新加入轻量随机扰动:
论文主实验使用轻微 damping 与小路径噪声,让轨迹不要过早卡进错误稳定点。
| 证据块 | 结果 | 应该如何理解 |
|---|---|---|
| Table 1: Feedforward vs iterative | Feedforward 最高 2.6% Sudoku / 0.0% Maze;EqR 99.8% / 93.0%。 | 硬约束任务上,泛化差异不是单纯参数量差异,而是是否存在可扩展的迭代状态转移结构。 |
| Table 3: Landscape shaping | baseline 84.8 / 44.9;RI 86.0 / 68.6;RI+NI 86.4 / 82.2。 | Maze-Unique 上 RI/NI 的收益尤其大,说明可达 basin 和 path stability 是关键瓶颈。 |
| Table 4: Test-time scaling | D=16,B=1: 86.4 / 82.2;D=64,B=1: 93.0 / 88.9;D=64,B=128: 99.8 / 93.0。 | depth 先让单轨迹更好收敛,breadth 再覆盖更多 basin;两者不是替代关系。 |
| Table 5: ACT efficiency | Sudoku-Lite 上 D=1024,B=1 从 1024 NFE 降到 58.7 NFE,accuracy 96.1 到 95.3。 | learned halting 能把大预算变成按样本难度分配的弹性预算,但会有小幅准确率折衷。 |
| Appendix A.3/A.4 | learnable initializer 未超过简单 RI;路径独立性 TRM 3.58/28.60 降到 RI+NI 0.13/1.33。 | KISS/YAGNI 上,简单随机初始化和固定噪声已经足够支撑主结论,没必要把机制过早复杂化。 |
Sudoku-Extreme 是 9x9 长程约束满足任务,论文复用 HRM 设置并有大验证集;Maze-Unique 是作者构造的 30x30 唯一路径 shortest-path 任务,训练/测试各 1000 个实例。指标是 exact accuracy:完整序列所有 token 都对才算 1。它不同于“局部 token accuracy”,也不同于 LLM benchmark 的自由文本评分。
边界和容易误读的地方
EqR 很有启发,但不能被过度外推。它给的是 controlled reasoning setting 下的机制证据,不是对所有 LLM 推理、所有递归模型、所有 benchmark 的通用证明。
论文附录明确:低 residual 只有在局部稳定、正确 attractor、正输出 margin 三个条件下才支持正确性。否则它只证明“收敛”,不证明“收敛到对的地方”。
Sudoku 和 Maze 的输入输出结构固定、答案可精确验证、任务 metric 明确。开放域 LLM 推理里的状态空间、目标函数和 verifier 都更脏,不能直接把 99.8% 外推成通用 reasoning scaling law。
论文使用 NLE/NFE accounting 表示 test-time compute 的放大。depth/breadth scaling 的收益要和延迟、吞吐、内存、batching 策略一起看;ACT 只是让预算分配更弹性,并没有让大规模迭代成本消失。
附录消融显示 hierarchy 的效果依赖 gradient truncation、SOT 和 ACT。把“加 hierarchy”从训练 recipe 中拆出来,很可能复现不到同样收益。
工程和研究启发
如果把 EqR 当成一个设计原则,而不是 Sudoku 技巧,它给循环/迭代模型训练提供了几条很实际的判断标准。
只看 accuracy 会把训练失败、收敛失败和错误 attractor 混在一起;只看 residual 会误把 spurious convergence 当成成功。二者一起看,才能判断 scaling 是否在走向正确 basin。
对长轨迹模型,早期状态可能只是过渡态。更合理的做法是识别模型已经接近有用 basin 的阶段,把强监督集中在可靠梯度上。
多 restart 不是天然有用;如果没有内部 convergence 信号,majority vote 可能只是放大偏差。EqR 的 convergence-based selection 依赖训练阶段先让 residual 变得有语义。
我的判断
EqR 最值得记住的不是“递归模型能在 Sudoku 上跑到 99.8%”,而是它把 test-time scaling 的一个隐藏前提显性化了:额外计算只有在模型内部有正确、可达、可选择的收敛结构时才是 reasoning;否则只是把同一个错误动力系统运行得更久。
这条 side-post 的价值在于揭示“迭代能力”不是 weight tying 自动带来的。Weight tying 只是给了模型一个可以反复应用的算子;SOT、监督位置、RI/NI 和 learned halting 才是在塑造这个算子产生什么 landscape。换句话说,loop model 的核心不是 loop,而是 loop 的相空间。
对更大的 LLM 或 agent 系统,最直接的迁移不是照搬 Sudoku 架构,而是引入类似诊断:内部状态是否随着额外计算稳定改善;停止信号是模型自己学到的还是外部 verifier 送来的捷径;多样本搜索是否有比 vote 更接近机制的 selection signal。只要这些问题答不上来,“test-time compute scaling”就仍然可能只是昂贵采样,而不是可解释的迭代推理。
术语解释与概念边界
- Equilibrium reasoning
- 把推理看成逐步收敛到稳定状态的过程,而不是一次前向传播直接给出答案。
- Neural attractor
- 系统动态中会吸引状态靠近的稳定区域。用于推理时,它对应模型反复修正后趋向的答案结构。
- Iterative reasoner
- 通过多轮内部更新改进表示的模型。它和普通 chain-of-thought 的区别是更新可发生在隐藏状态层面。
- 收敛失败
- 如果迭代进入错误吸引子,更多步数可能会让错误更稳定,而不一定带来更好答案。
证据边界与资料索引
本文把用户给出的 side-post 作为入口,但不只复述原帖。真正的技术上下文来自同一作者的 EqR 主帖、arXiv 论文、GitHub README、作者在回复中的澄清,以及 side-post 中的训练动态配图。
X 主帖 2058320088475037801 及 14 条相关记录给出从 feedforward 到 capable iterative model 的五段式构造:
feedforward 2.6%、weight-tying 32.6%、online training 74.7%、hierarchy 76.5%、adaptive compute 84.8%。
下载 arXiv 2605.21488v1 PDF,本地核验为 30 页。论文给出 EqR 的固定点视角、RI/NI 两个 landscape-shaping intervention、depth/breadth scaling、ACT 计算效率实验和附录中的训练动态消融。
读取 GitHub README:仓库用于复现 Sudoku-Extreme 和 Maze-Unique 实验,提供 Hugging Face 模型/数据、训练脚本、评估脚本、CUDA 依赖说明。报告只把 README 作为可复现性证据,不把未运行的训练结果当成本地复现实验。
主帖 2057641657580064941 解释 EqR 的完整叙事:weight tying 把网络变成 latent dynamical system,depth 是跑更长轨迹,breadth 是多次随机初始化并用 convergence-based selection 选低 residual 轨迹。bonus 回复中作者确认部分 ACT gain 来自训练动态,而不只是测试时 early halting。