问题背景:它到底要解决什么问题
论文关心的是 terminal agents 的多轮强化学习,不是普通 chat model,也不是只做代码补全。
一个 terminal agent 在 Docker/container 里接任务,然后多轮执行命令:读文件、改文件、跑测试、看 traceback、继续修复。训练时常见做法是让模型采样多个 rollout, 最后用 verifier 或单元测试给每条轨迹一个二值奖励:任务做成了就是 1,没做成就是 0。论文使用的是 GRPO 风格的训练:对同一个 prompt 采样多条轨迹,用组内 reward 相对差异产生 advantage, 再更新模型在 action tokens 上的概率。
这里的核心困难是 reward 太稀疏。论文给出一个具体现象:在 Qwen3-8B 设置里,很多任务下少于 15% 的 on-policy rollouts 能成功。
这意味着多数轨迹对 policy gradient 来说要么没有组内 reward 对比,要么只得到粗糙的负信号。但这些失败轨迹并不空:里面有 ls 输出、测试错误、文件内容、日志、traceback、
exit code、grep 结果。这些东西恰好告诉模型“刚才那个命令让环境发生了什么”。
模型会条件化在旧的 terminal 输出上生成下一步行动,所以 observation 会影响未来 action。
terminal 输出 token 不进入 loss,因此模型没有被直接训练去预测“执行这个命令之后会看到什么”。
机制拆解:ECHO 怎么做
方法本身非常简单:同一条 rollout、同一次 forward、两组 token mask、两个 loss。
把多轮交互切成 action tokens 和 observation tokens
一条训练序列长得像:system prompt、用户任务、agent 第一次行动、terminal 第一次返回、agent 第二次行动、terminal 第二次返回,直到结束。
论文用 A 表示 assistant-action token 位置,用 O 表示 environment-observation token 位置。
action tokens 继续用 GRPO
对 agent 自己写出的行动,例如 reasoning block、bash command、task-done signal,仍然用 GRPO 的 clipped policy-gradient loss。 reward 来自最终测试是否通过,二值化为 1 或 0。
observation tokens 加 cross-entropy
terminal 输出是已经发生的 ground truth。ECHO 在这些 token 上加 next-token prediction loss,让模型学习: 在前文包含任务、历史命令和当前命令的条件下,terminal 会输出什么。
排除 harness warning,只训练真实 terminal 输出
论文发现 warning prefix 很快被记住,梯度价值低;真正有用的是 command output,例如文件名、测试失败、错误格式、byte count、traceback。 因此主设置使用 env-only observation targets。
A 是 action token 位置,O' 是真实 terminal-output token 位置,|O| 做按 observation 长度归一化。主实验使用 λ = 0.05。
因为训练 GRPO 时本来就要对完整 transcript 做一次 actor forward,logits 已经在所有位置算出来。 ECHO 只是额外在 observation mask 上 gather log-prob 并 reduce。真正昂贵的 attention/MLP 反传仍然走同一批 activation,不需要额外 rollout、teacher model 或第二次 forward。
但“免费”不是完全没有代价。更准确说法是:相对采样环境交互、额外 teacher、额外模型前向,这个改动的边际成本很低;不过 observation token 也会引入额外 loss 项,
并且会改变梯度方向。因此 λ 不是无脑越大越好。论文 sweep 了 0.001 到 0.2,
发现 0.01-0.05 比较有效;0.1 会让 policy plateau 或退化,0.2 甚至可能让模型偏向制造容易预测但对任务无用的 terminal 输出。
评估证据:它到底评估了什么
这篇工作评的是 terminal task completion,不是模型能不能口头解释命令。
| 项目 | 论文设置 | 含义 |
|---|---|---|
| 训练任务 | 8870 个 terminal tasks,其中 8770 训练、100 个 in-distribution validation | 任务来自 Endless Terminals、OpenThoughts-Agent-v1-RL,并用修改后的 Endless Terminals pipeline 扩展;保留 GPT-5 至少 16 次尝试中解出过一次的任务。 |
| 交互环境 | Docker + Harbor,最多 16 turns,16k context,每 turn 最多 2048 generated tokens | agent 写 Qwen XML-format bash command,harness 解析并执行,然后把 stdout/stderr/exit code 返回。 |
| 基础模型 | Qwen3-8B、OpenThinker-Agent-v1-SFT、Qwen3-14B | OpenThinker-Agent-v1-SFT 是 Qwen3-8B 用约 15k 条 GLM-4.6 expert terminal-agent demonstrations SFT 得到的起点。 |
| RL 配方 | 16 rollouts/prompt,batch size 16,LR 1e-6,temperature 0.8,500 steps,8 张 B200 | GRPO 和 ECHO 保持同一配方,主要变量是 observation tokens 是否进入 environment cross-entropy。 |
| 指标 | pass@1、pass@3、pass@5 | pass@k 表示每个任务采样 k 次尝试时至少一次通过的概率或比例。内部 eval 用 8 rollouts/task,TB2 用 Terminus 2 harness 做 5 rollouts。 |
“learn world model” 在这里不是训练一个显式 simulator,也不是让模型在 inference 时先模拟未来状态再规划。 论文更保守的 operational claim 是:ECHO 让同一个 policy 更会预测 terminal output,这说明它的隐藏表示吸收了一部分 terminal dynamics。
关键证据:结果数字怎么读
最有价值的不是某个单点翻倍,而是四类证据互相支撑:任务成功率、terminal 输出预测、SFT 替代性、verifier-free adaptation。
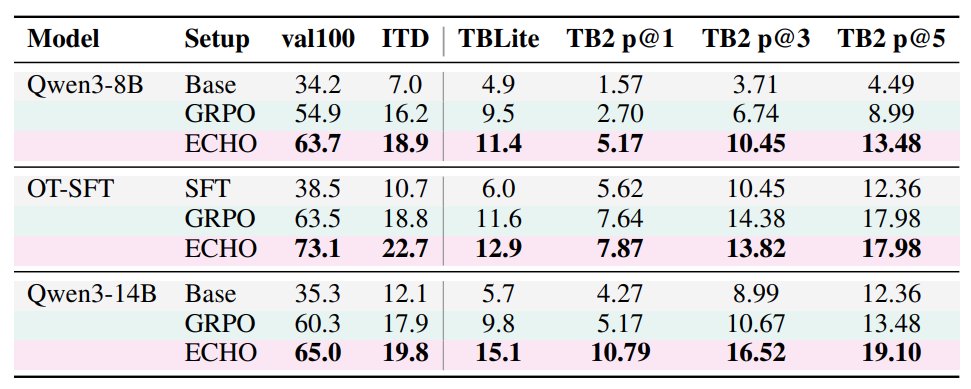
| 起点 | GRPO TB2 pass@1 | ECHO TB2 pass@1 | 解释 |
|---|---|---|---|
| Qwen3-8B | 2.70 | 5.17 | 接近 1.9 倍;绝对值仍低,说明 TB2 对小模型非常难,但 ECHO 显著改善样本效率。 |
| OT-SFT | 7.64 | 7.87 | 提升很小;专家 SFT 起点已经包含大量 terminal interaction prior,ECHO 的边际空间变窄。 |
| Qwen3-14B | 5.17 | 10.79 | 接近 2.1 倍;论文认为大模型可能更能内化可迁移的 terminal dynamics。 |
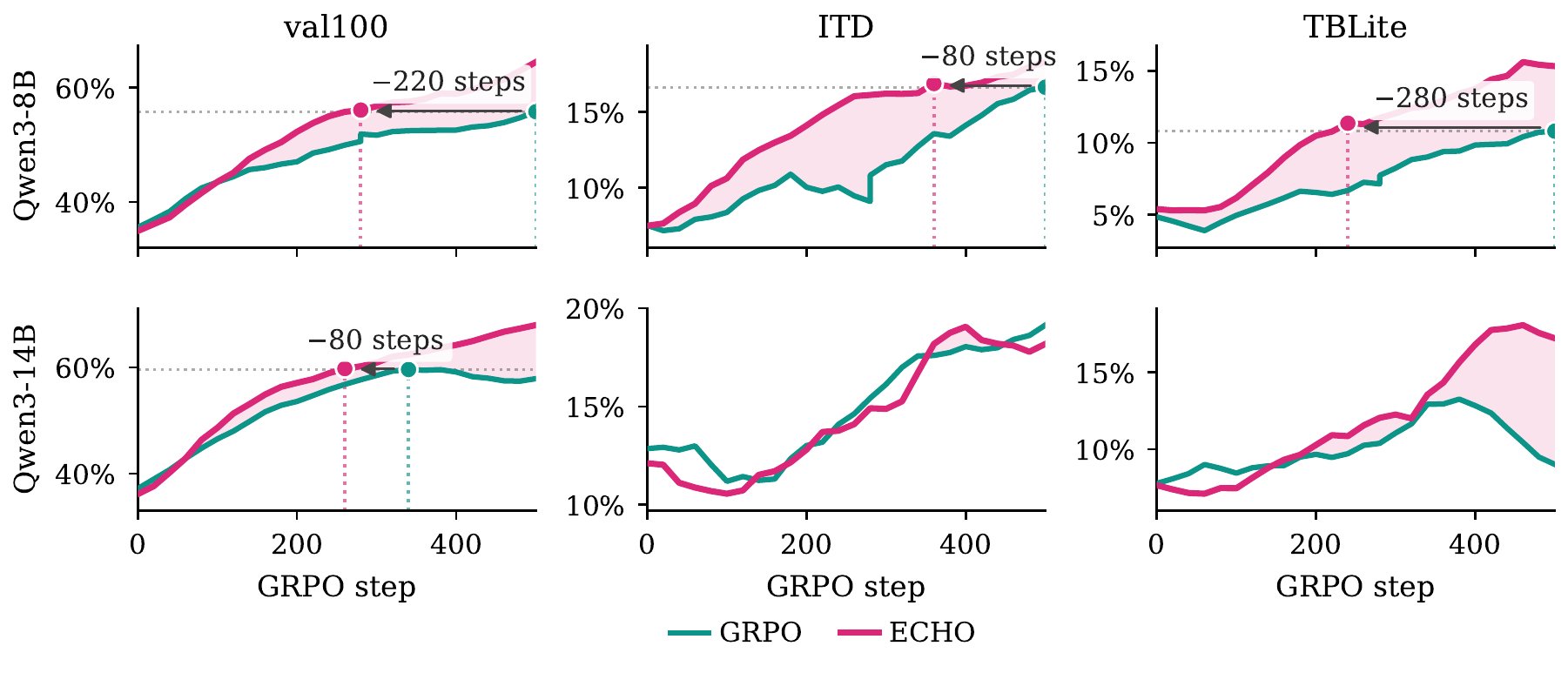
ECHO 在 val100、ITD、TBLite、TB2 的多数组合中优于 matched GRPO;最吸睛的是 TB2 pass@1 的近似翻倍。
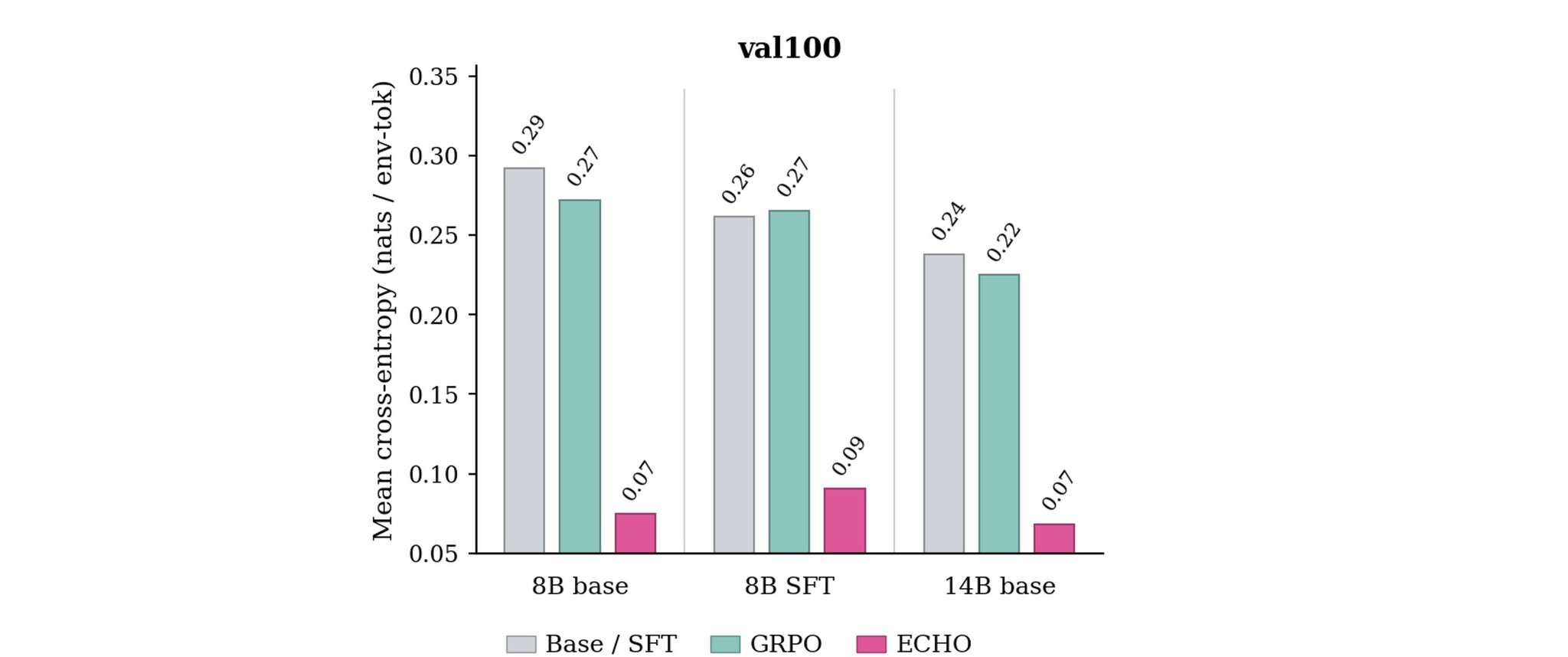
在 Qwen3-32B 生成的 held-out off-policy trajectories 上,ECHO 显著降低 terminal-output cross-entropy,GRPO 几乎不变。
Qwen3-8B 上,ECHO 在内部评测恢复了几乎全部 expert-SFT gap,在 TB2 上恢复约一半。
作者从最强 Qwen3-8B+ECHO checkpoint 出发,关掉 GRPO,只训练 L_env 100 steps。
val100 提升 +3.8pp;过滤干净工具调用后,PyTerm 提升 +10.0pp,ITD 提升 +5.2pp,但 TBLite 下降 -3.9pp。
这说明“只从环境后果学习”不是万能自我改进,只在 rollouts 足够干净、observation 足够 informative 时成立。
回复区真正有价值的讨论
回复区的价值在于把 ECHO 放回 agent RL、world model、auxiliary loss 的历史脉络里。
有人指出,对非 assistant turn 加 NLL loss 作为 regularization 不是全新概念。我的理解是: 形式上确实像,但 ECHO 的 domain-specific 贡献在 terminal agent 的 action-consequence 结构上, 它训练的不是任意用户文本,而是 action 导致的环境反馈。
作者回复说不是单独 autoencoder,而是同一个 model/policy 上的 terminal token cross-entropy。 action model 和 world model 是一个模型,不是两个模块。
作者承认取决于任务种子、复杂度、多样性和 coverage。如果任务只让模型 grep 文本,terminal dynamics 很贫乏,就学不到有用世界模型。
有回复认为 terminal 输出多数细节并不总是有用,应该学更抽象状态。作者同意方向,但提到他们更倾向 compaction,而不是直接做 JEPA。
这些讨论说明 ECHO 的新意不应被夸张成“首次发现 auxiliary prediction”。它更像是把 RL 里长期存在的 forward dynamics / auxiliary prediction 思路, 非常直接地插入到 LLM terminal agent 的 on-policy GRPO 训练环里。这个插入点很干净:不用另训 simulator,不改变 inference 架构,也不需要 expert teacher。
它没有证明什么
这篇文章值得重视,但不要把标题里的 “world model” 读得过强。
它证明模型更会预测观察到的 terminal 文本,不证明模型能显式模拟文件系统、进程状态或长期因果结构。 这是一个 operational world-model claim:更好的压缩/预测 terminal dynamics,而不是完整可规划 simulator。
如果 λ 太大,模型可能偏向制造容易预测的输出,而不是推进任务。论文自己的 sweep 已经观察到 λ=0.1/0.2 可能退化。 所以 ECHO 是一个要调权重的 auxiliary objective,不是纯收益开关。
Python traceback 这类反馈和 action 强绑定,特别适合 ECHO;但更广泛的 terminal tasks 可能需要多步文件/配置/进程状态推断,输出未必足够直接。 这也是 TBLite 在 env-only adaptation 中下降的一个解释。
X Article 和论文指向 microsoft/echo-rl。搜索结果能看到仓库描述,但当前直接访问 GitHub 页面/raw README 失败。
因此本报告只基于 X Article 与 PDF 论文分析,不对开源代码成熟度、可复现脚本、配置完整性做判断。
工程启发:我认为它真正重要在哪里
这篇工作的 insight 在于重新定义“agent rollout 里什么是监督”。
我觉得 ECHO 最值得记住的不是 TerminalBench-2.0 上 2.70 到 5.17、5.17 到 10.79 的数字,而是一个训练观念: 对 agent 来说,环境返回的文本不是被动上下文,而是行动后果的监督标签。只要世界用 token 反馈,模型就可以用 next-token prediction 从这些反馈里学习一部分 dynamics。
这对未来 agent RL 很关键。现在大家经常在两个极端之间摇摆:要么模仿 expert trajectories,要么等待稀疏 verifier reward。 ECHO 插入了第三种信号:不告诉你“这步好不好”,但告诉你“这步真实造成了什么”。这类信号本身不直接等于策略优化,却能改变模型的 representation 和 action prior, 让后续 policy optimization 更容易。
但我会保守看它的外推。terminal 是一个特别适合 ECHO 的环境,因为返回文本结构化、真实、和 action 因果相关:命令错了就有错误,测试挂了就有 traceback,文件存在就能列出来。 如果迁移到 browser agents、GUI agents、用户对话或多工具系统,环境反馈可能更含噪、更延迟、更偏偏好表达。此时原始 observation tokens 未必是好 target, 可能需要 summary、state abstraction、trajectory filtering 或 credit assignment 改造。
ECHO 不是“终结 expert SFT / verifier reward”的方法,而是一个很有可能成为 agent RL trainer 标配的低成本辅助项。 它的强度取决于三件事:环境反馈是否信息密集、rollout 是否干净、loss 权重是否不压倒策略目标。 如果这三件事成立,它确实把原本被 mask 掉的一大块监督找回来了。
术语解释与概念边界
- Terminal agent
- 在命令行环境中读文件、执行命令、修改代码和观察报错的 agent。它面对的是连续环境状态,而不是一次性问答。
- World model
- 模型对环境如何响应自己动作的内部预测。ECHO 的重点是让模型不仅会行动,也更会预测下一步观察。
- Observation token
- 环境返回的文本片段,例如测试输出、报错或文件内容。训练这些 token 能让模型学习操作后的后果。
- Harness warning
- 评测框架自身产生的提示或警告,不代表真实终端状态;如果混入训练,会污染模型的环境理解。
证据边界与资料索引
这次材料不是单条推文,而是一个 X Article 入口。原帖只有短链,短链指向 X 长文;长文再链接论文 PDF 和代码仓库。
原帖:DimitrisPapail/status/2056368948870811746, 包含原帖、回复和作者补充;短链指向 X Article。
长文链接到 echo.pdf。 该 PDF 全文 13 页,文档创建时间为 2026-05-19。
X Article 与论文都指向 microsoft/echo-rl。 公开检索能看到该仓库标题和描述,但其 GitHub 页面与 raw README 当前返回不可读/404。因此本文不对代码实现做已核验判断。
ECHO 的思想是:CLI agent 的 rollout 本来就是 action → terminal observation → action → terminal observation 的序列;
标准 RL 把 observation 只当上下文,ECHO 把 observation 也当预测目标,于是失败轨迹也能贡献关于环境动态的监督。