核心判断
Rohan Paul 那条帖子抓住了论文最表层的一层:AutoLab 证明长时程 agent 的成功,不只取决于第一拍有多聪明,而更取决于能不能持续 benchmark、编辑、吸收反馈。但如果只停在“persistence beats intelligence”,就把一个系统控制问题道德化了。
更准确的表述是:AutoLab 把 agent 从“answer engine”推进到了“loop engine”的评价框架。它测的不是单次回答质量,而是模型与 harness 组成的控制系统,能否在有限墙钟时间、固定算力、上下文窗口和工具约束下,把内部推理与外部实验回路配平。
一句话结论:AutoLab 的核心发现不是“聪明不如坚持”,而是在长时程优化里,外部反馈闭环的管理能力开始比单次推理 brilliance 更值钱。这意味着下一代 coding / research agent 的主战场,可能从“第一次答得多漂亮”转向“能否连续 20 次做出有效实验回路”。
为什么现有 benchmark 不足以解释长时程 agent
AutoLab 的问题意识非常明确:现实中的科研与工程进展,并不是“一次答对”就结束,而是围绕可测量 artifact 的反复实验与修正。现有很多 benchmark 能测知识、测 patch、测短轨迹交互,但不擅长测持续经验回路。
静态 benchmark 的盲点
HumanEval、LiveCodeBench、BigCodeBench 一类 benchmark 主要关心单次生成是否正确。SWE-bench、Terminal-Bench 向前走了一步,但很多时候仍把评估焦点放在终态 artifact,而不是长时程的实验过程本身。
真实优化任务的结构
现实系统优化或模型训练,通常都要求:先定位瓶颈,再提出假设,随后运行实验、读取指标、修正思路。真正拉开差距的经常不是第一版 patch,而是第 5、10、20 次反馈驱动的修订。
预算是能力的一部分
长时程 agent 不是无限时间里的抽象推理器,而是在固定 wall-clock、有限 GPU/CPU、有限上下文里工作的执行系统。什么时候该继续探索、什么时候该收敛提交,本身就是能力的一部分。
这也是为什么 AutoLab 强调的不是 generic “research agent”,而是更具体的auto research / engineering optimization:任务有明确 metric、有工作但较弱的 baseline、有固定预算,agent 的职责是把 artifact 变得更好。
AutoLab 的任务机制:它到底在测什么
从论文、官网和公开 repo 的 task.toml 可以看出,AutoLab 的每个任务都由五件事构成:instruction、environment、verifier、reference solution、wall-clock budget。agent 不是面对空白世界,而是面对一个“正确但明显不优”的起点,然后在容器环境里持续改造它。
四类任务与时间预算
| 维度 | 数量 / 分布 | 含义 |
|---|---|---|
| System Optimization | 15 个任务 | 偏 C / Rust / Go / Python 系统优化,例如 flash attention、hash join、regex engine、radix sort。 |
| Puzzle & Challenge | 10 个任务 | 偏算法构造与单点洞见,例如 sorting network、VLIW scheduling、parameter golf。 |
| Model Development | 7 个任务 | 偏模型训练与后训练,例如 scaling law、GRPO、多语言 OCR、online serving。 |
| CUDA | 4 个任务 | 偏 H100 上的低层 kernel 优化。 |
| 时间预算 | 25 个任务 2 小时;7 个任务 4 小时;3 个任务 8 小时;1 个任务 12 小时 | 它确实是 long-horizon,但主要是 2–4 小时级别的中长闭环,而不是多天级自主科研模拟。 |
| GPU 任务 | 11 个任务:8 个 H100、3 个 L40S | 说明它的硬件开销和工程 realism 都不低。 |
为什么它的分数不是“百分比”
AutoLab 不是简单的 pass/fail。它使用两套 anchored scoring:
- 性能类任务:使用 log-stretch,相对于 baseline 和 reference 的数量级差距计分,并且必须先真正超过 baseline 才得分。
- 质量类任务:使用 anchored linear,在 baseline 与 reference 之间做连续插值。
这里非常重要的一点是:reference 并不等于“世界最优”或“100 分”。很多任务的 reference 是“略高于当前已测最强模型表现”的锚点,目的是保留 headroom,避免 benchmark 太快饱和。因此 AutoLab 的 0.68 绝不能被粗暴理解成“自动研究能力完成了 68%”。它更像一个校准后的相对能力分。
更深一层的意义:AutoLab 并不只是在比“能不能改对”,而是在比“在连续空间里,谁能更稳定地把 baseline 往参考线甚至更高处推”。这比二元正确率更接近真实优化任务的形状。
为什么它比很多 benchmark 更难 hack
性能 benchmark 的一个老问题是 reward hacking。AutoLab 针对这个问题做了较多约束:sealed verifier、correctness gate、受保护文件的 SHA pin、adversarial audit、immutable-file checks。也就是说,它不想把“绕过评测”误判成“做出了更好方案”。
几个必须先讲清楚的术语
Closed-loop resilience
这是 AutoLab 博客和论文都反复强调的词。它不是泛泛的“坚持”,而是指 agent 能否在负反馈和不确定结果面前,继续 benchmark、读信号、重构策略,而不是提早停下或无效空转。
Avg@3 / Best@3
Avg@3 是同一模型在同一任务三次 rollout 的平均分,更接近“通常水平”;Best@3 是三次里最好的一次,更接近“理论上限”。论文反复提醒:高方差模型只看 Best@3 会被高估。
Dominance
不是单纯平均分,而是对所有任务做 head-to-head win rate。它告诉你某模型在多少任务上系统性压过其他模型,因此比“少数任务极强”更能体现稳健统治力。
Harness
harness 是包在模型外面的控制层:如何组织上下文、什么时候调用工具、如何管理 terminal、何时停止、如何验证结果。长时程任务里,harness 不是实现细节,而是一等变量。
主结果真正说明了什么
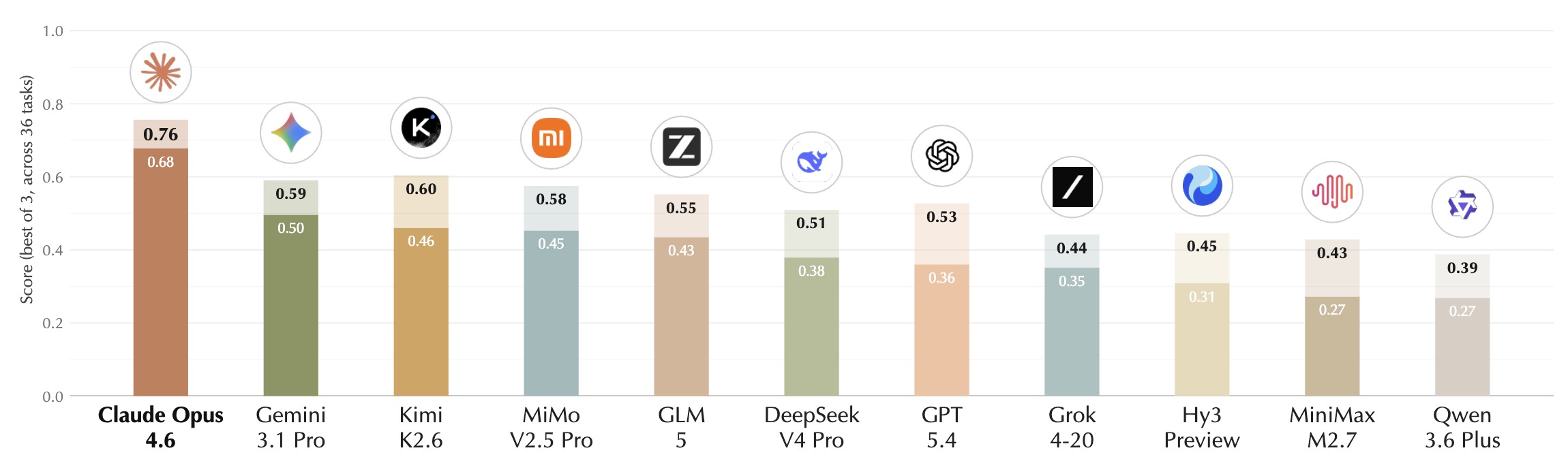
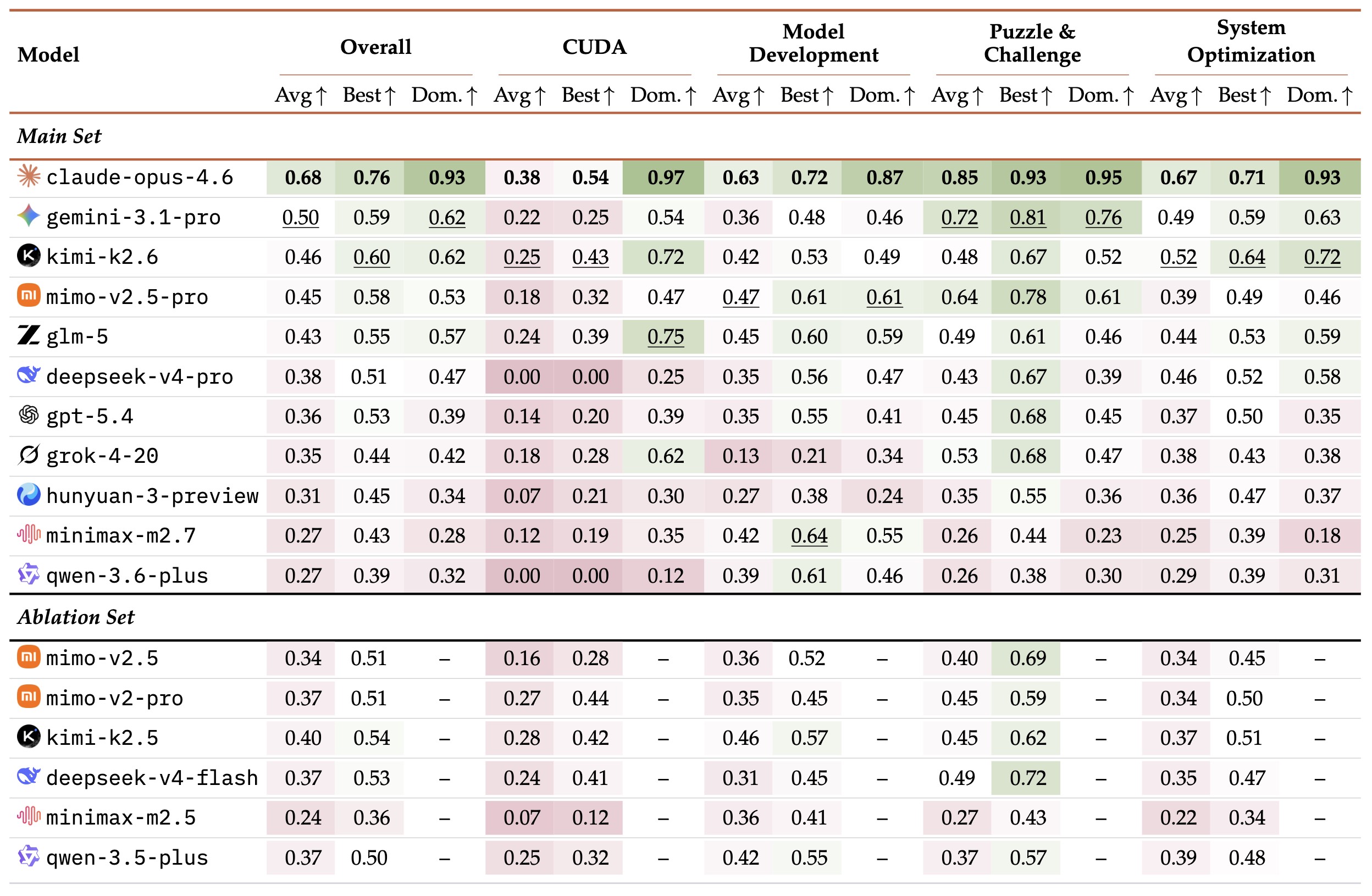
论文总共评估了 17 个模型;其中官网与主图主要展示 11 个 provider flagship。作者报告这轮评估消耗了 2544 wall-clock hours 和 8.60B tokens,本身已经说明这是一个重型 benchmark,而不是小样本示意实验。
为什么 Claude 的领先不能简单读成“它最聪明”
论文主结果里,Claude Opus 4.6 的 Avg@3 = 0.68,第二名 Gemini 3.1 Pro 为 0.50,而 Claude 的 Dominance = 0.93。作者明确强调:Claude 的优势不只是写出第一版方案,而是更愿意且更有效地持续 benchmark、迭代和纳入反馈。
但这件事如果继续追问,会发现它其实是在说:Claude 在这套 harness 下更像一个稳定控制器。也就是说,它能在“内部想多久”和“外部实验多少轮”之间做出更有效的预算分配。
Flash Attention case study 为什么重要
论文拿 flash_attention 任务做了轨迹分析。所有模型都从大约 750ms 的同一 baseline 出发,reference 约为 100ms。Claude Opus 4.6 通过 44 次反馈驱动迭代,在约 40 分钟内把 runtime 降到 18ms,约 42.4× speedup,甚至超过 reference。这里最重要的不是“它懂 Flash Attention”,而是它不断把 benchmark 结果翻译成下一轮更精细的工程动作。
深一点看:AutoLab 实际上在测试两个循环的竞争——模型内部的 reasoning loop,与环境外部的 experiment loop。长时程任务里,继续内部思考的机会成本非常高,因为每多花一分钟空想,就少一分钟去拿 empirical signal。
论文真正测出来的,不是一句 persistence,而是五层闭环能力
1. 实验启动速度
是不是足够快地建立 baseline、定位瓶颈、跑出第一轮真实信号。很多长时程失败从第一小时就已经注定,因为 agent 太久不验证。
2. 反馈吸收能力
不是跑了 benchmark 就算数,而是 benchmark 是否真的改变了下一步策略。没有 credit assignment 的试错不等于闭环。
3. 探索 / 利用平衡
什么时候继续试新方向,什么时候沿着有效路径深挖,什么时候转入收敛。这里本质上是资源分配问题,而不是知识量问题。
4. 状态管理
会不会保住 best-so-far artifact,会不会在一次好中间结果后又把自己改回更差版本。长时程任务里,“会不会收纳成果”就是能力。
5. 时间意识
还剩多少预算?现在该继续发散,还是强制收尾?AutoLab 许多失败都不是不会做,而是没有把最后 20% 的时间变成可提交产物。
为什么这比单次推理更关键
因为现实中的长时程优化从来不是一次性得到最优解,而是在 noisy signal 中反复修正。AutoLab 把这种“元认知调度”第一次较完整地拉到了台前。
最有价值的结果其实是 failure mode,而不是 leaderboard
论文人工检查了 302 个零分 rollout,并把失败分成几类。其中最关键的两类,不是“模型不会写代码”,而是预算治理失败。
过早停止:预算还没花完就交卷
一些模型在还有大量时间的情况下,只做了极少数实验就提交了平庸方案。论文明确点名 GPT-5.4、Grok-4-20 更容易出现这种短时程终止行为。它们不是完全没能力,而是没有把能力转化成足够多的外部试验回合。
思考太久 / 迭代过散:最后连有效提交都没有
另一类模型不断迭代、不断思考,甚至单步 reasoning 时间极长,最终却把预算耗尽在“正在做事”的状态里,没有把最好结果转成最终提交。这是另一种 budget allocation failure。
这也解释了为什么评论区里那句“这不是 reasoning failure,而是 budget allocation failure”其实比“character problem”更接近论文本意。AutoLab 的核心并不是道德化的 persistence,而是外部实验节奏与时间分配。
公开 trajectory 子集还提供了一个更细的修正
repo 里公开附带了一小部分 flux2_klein_lora 轨迹,可用来观察“步数 / token 数 / 收益”之间并不简单线性。下面这张表不是论文主结果,只是公开子集里的一个说明性例子:
| 模型 | episodes | 结果 | 说明 |
|---|---|---|---|
| Grok 4.20 | 13 | reward = 0 | 公开 verifier 输出显示没有产出 LoRA 文件,属于典型“没有留下可评分 artifact”的失败。 |
| Kimi K2.6 | 50 | reward = 1.0482 | 虽然 agent 最终 timeout,但中间留下的 LoRA 仍被 verifier 打出高分,说明“收尾纪律差”不等于“没有有效实验”。 |
| MiniMax M2.7 | 146 | reward = 1.0003 | 高 episode 数不自动等于更强;真正重要的是这些回合是否持续产生高价值试验。 |
| Claude Opus 4.6 | 138 | reward = 0.9102 | 在这个公开子任务上并非最好,这反而提醒我们:Claude 的整体优势更像跨任务稳健性,而不是每个单任务都绝对最强。 |
这个子集给出一个很关键的修正:step 数不等于 productive persistence,token 数也不等于闭环质量。真正值钱的是“高价值实验回合密度”。
这篇论文最值得追问的地方:它到底测的是模型,还是测的是 harness × model?
AutoLab 自己做了一个非常关键的 ablation:同样的模型,在 25 个 CPU 子任务上换三种不同 harness——terminus-2、pi-mono、以及带优化导向 prompt 的 mini-swe-agent*——均分最高变化可达 Δ = 0.43。而且模型相对排名会反转:有的 harness 偏爱单次推理强的模型,有的 harness 更能放大小模型反复试错的收益。
为什么这很重要
它说明长时程 agent leaderboard 并不是“纯模型智力榜”,而是 model × harness 的联合作用结果。上下文组织、停止策略、命令 batching、总结时机、best-so-far 保存方式,都会改变最终得分。
它和外部讨论高度一致
这正好呼应了另一篇 position paper《Stop Comparing LLM Agents Without Disclosing the Harness》:长时程任务里,harness 往往是比底模更强的一阶变量。如果不公开 harness 设计,很多所谓“模型进步”其实可能是 controller 进步。
因此,对 Rohan 那条帖更准确的修正是:AutoLab 不是简单说明“Claude 更 persistent”,而是说明在 Harbor + terminus-2 这套受控执行框架下,Claude 表现出了最强的闭环行为。但这和“Claude 天生最会做长时程研究”并不是同一句话。
放到更大的 benchmark 谱系里,AutoLab 的位置在哪里
| Benchmark | 主要对象 | 强项 | AutoLab 与它的差异 |
|---|---|---|---|
| RE-Bench | ML research engineering,对照 61 位人类专家 | 最强处是有人类基线,能看到 AI 与人类在 2h / 8h / 32h 预算下的收益曲线差异。 | AutoLab 没有人类对照,但任务更广;它更关注跨系统优化、算法构造、模型开发和 CUDA 的统一评分协议。 |
| AIRS-Bench | 完整 research lifecycle,不给 baseline code | 更接近从零开始做研究,包括想法生成、实验分析和迭代 refinement。 | AutoLab 更像“从一个可运行基线继续优化到更强”,测的是 optimization agency,多于 discovery agency。 |
| KernelBench | GPU kernel 生成与优化 | 很窄但很纯,能够直接测 fast correct kernels。 | AutoLab 向外扩展:不仅有 kernel,还有系统、模型开发、算法 puzzle,因此更接近“跨域优化基准”。 |
所以 AutoLab 最准确的定位不是“完整自动科学 benchmark”,而是:面向长时程、可测量、闭环优化的跨域 benchmark。它在 answer-oriented benchmark 与 full scientific discovery benchmark 之间,填上了一个以前相对空白的位置。
这篇工作重要,但也不该被夸大到“自主科研已来”
它主要测的是优化,不是完整发现
36 个任务里大部分仍是系统 / 算法 / kernel / 训练优化,而不是从问题选择、假设形成、指标质疑到结论外推的完整科学过程。
大多数任务并没有真的长到“几天”
25 个任务只有 2 小时预算,说明它更像强约束下的中长时程实验回路,不等于多天自主研究员的工作节奏。
目标函数是预先给定的
真实研究里,很多 hardest part 是发现 metric 在骗人、发现问题设定本身错了、或判断某条路线根本不值得做。这些在 AutoLab 里基本被外部定义好了。
硬件与 harness 依赖性很强
任务分数与具体 sandbox、GPU 类型、controller 设计都有耦合。AutoLab 已经做得比很多 benchmark 更诚实,但这仍然意味着结果首先是“在这套 protocol 下的结果”。
换句话说,AutoLab 的真正价值不在于宣告“research agent 已接近自主科研”,而在于告诉我们:未来的 agent 竞争焦点,已经从单轮 correctness 转向长时程 empirical loop quality。
对 agent 产品设计最直接的启发
如果把这篇论文翻译成产品和系统设计原则,几乎是现成的 roadmap:
- 尽早 benchmark,而不是先想很久。第一轮真实信号应该尽快出现,外部测量常常比继续内省更有价值。
- 显式保存 best-so-far。任何长时程 agent 都需要把当前最好版本做成一等状态,而不是让工作区一路滚动污染。
- 做时间感知的停止策略。不是只会继续,也不是只会尽快交卷,而是知道何时转入 exploitation,何时强制收尾。
- 限制单步过长思考。reasoning token 的机会成本在长时程环境里是真实存在的;想太久本身就可能是一种失败。
- 把 harness 当作核心产品面,而不是胶水。在长时程 agent 里,controller、context management、tool loop、verification orchestration 共同决定了上限。
我的最终判断:AutoLab 最值得记住的不是“Claude 赢了”,而是它把一个以前很模糊的命题讲清楚了——未来强 agent 的关键能力,不只是更像会答题的模型,而是更像会管理实验、预算、状态和反馈的研究操作系统。
证据边界与资料索引
本页以 Rohan Paul 的 X 帖为入口材料,但主要判断依据来自 AutoLab 论文、官网 leaderboard 与 task 说明、公开代码仓库以及官方博客;横向定位部分补充参考了 RE-Bench、AIRS-Bench、KernelBench 与一篇关于 harness 披露的 position paper。文中提到的 flux2_klein_lora 公开 trajectory 仅作为说明性子样本,用来观察“episode 数、timeout 与 reward 之间并不简单线性”的现象,不代表整套 benchmark 的总体统计。本文没有独立重跑 AutoLab 全部任务,所有分数与截图均基于公开材料。
- Rohan Paul 的 X 帖:AutoLab 入口解读
- AutoLab: Can Frontier Models Solve Long-Horizon Auto Research and Engineering Tasks?
- AutoLab 官网与 leaderboard
- AutoLab 官方博客:Can Models Begin to Participate in the Loops That Drive Scientific and Engineering Progress?
- AutoLab GitHub 仓库(任务定义、README、公开 trajectory 子集)
- RE-Bench: Evaluating Frontier AI R&D Capabilities of Language Model Agents against Human Experts
- AIRS-Bench: a Suite of Tasks for Frontier AI Research Science Agents
- KernelBench: Can LLMs Write Efficient GPU Kernels?
- Stop Comparing LLM Agents Without Disclosing the Harness