轨迹不是技能
一个 episodic trajectory 记录了“这一次发生了什么”:读了哪些文件、运行了哪些命令、哪里失败、怎样修复、最终 verifier 如何反馈。 这些信息很有价值,但它混有 fixture-specific 细节、失败假设和偶然上下文。
一个 procedural skill 应该回答另一个问题:未来遇到同类任务时,什么时候触发、按什么步骤做、检查什么、避开什么捷径。
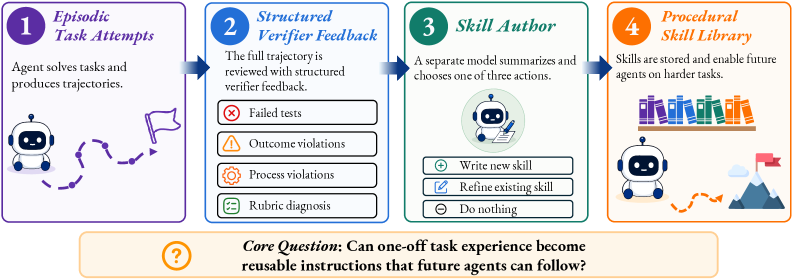
这篇论文问的不是 agent 会不会调用 skill,而是更关键的一步: 真实任务留下的工具调用、代码修改、失败尝试、verifier feedback, 能否被压缩成未来 agent 在上下文迁移、诱导捷径和多技能组合中仍可复用的程序性技能。
轨迹复用、反思记忆、workflow memory 都说明旧经验有用;agent skills 说明程序性指导有用。 SkillEvolBench 关心中间缺失的一步:一次性经验能否变成 durable procedural knowledge。
一个 episodic trajectory 记录了“这一次发生了什么”:读了哪些文件、运行了哪些命令、哪里失败、怎样修复、最终 verifier 如何反馈。 这些信息很有价值,但它混有 fixture-specific 细节、失败假设和偶然上下文。
一个 procedural skill 应该回答另一个问题:未来遇到同类任务时,什么时候触发、按什么步骤做、检查什么、避开什么捷径。
SWE-bench、WebArena、OSWorld 等更偏“能不能完成任务”;SkillsBench 证明 curated skills 有用, 但 self-generated setting 更接近 cold-start,尚未回答 agent 能不能从真实执行和 verifier feedback 中沉淀 skill。
SkillEvolBench 的贡献,是把每次 acquisition attempt 变成一次抽象机会,再把 library 冻结后放到 deployment 任务上检验。
判断标准很严格:如果 skill 只提升 acquisition 或 replay,它可能只是本地补丁;只有 frozen deployment 的 context-shift、adversarial、composition 也提升,才更接近 reusable skill。
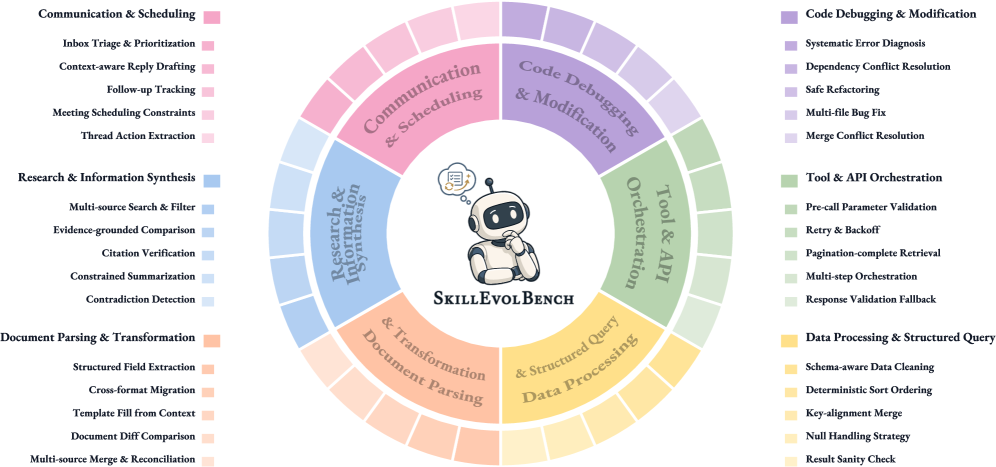
每个环境包含 5 个 recurring procedural families。每个 family 包含 6 个 role-conditioned tasks: 前 3 个暴露经验,后 3 个冻结评测。
| 环境 | 五个 skill family | 它主要测什么 |
|---|---|---|
| E1 Code | 系统错误诊断、依赖冲突、安全重构、多文件 bug、merge conflict | 代码修改中的根因追踪、行为保持、跨文件协调和冲突合并。 |
| E2 Tool/API | 参数校验、重试退避、分页拉取、多步编排、响应校验 fallback | API discipline、状态依赖和接口边界条件。 |
| E3 Data | schema 检查、类型归一化、join key 对齐、null-safe 聚合、结果 sanity check | 表格处理里的前置检查、清洗和结果验证。 |
| E4 Docs | 字段抽取、格式迁移、模板填充、文档 diff、多源合并 | 结构化转换和源目标一致性验证。 |
| E5 Research | 多源筛选、证据比较、引用核验、约束摘要、矛盾检测 | 信息综合中的 evidence grounding 和 source fidelity。 |
| E6 Communication | 邮件 triage、上下文回复、follow-up 跟踪、会议排期、action item 抽取 | 开放式沟通任务里的多约束执行和上下文保真。 |
每个 environment 是一个独立 lifelong episode。skills 可以在同环境内累积,但切换环境时 reset,避免跨环境泄漏。
Self-generated 从空 skill 开始;curated-start 从 gap-exposed curated skill 开始;zero-shot 只根据 metadata 写 fixed skill。
agent 依次处理 canonical、enriched、variant。每次尝试后,系统记录指令、文件访问、工具调用、命令、编辑、输出、测试和最终响应。
rich compaction 给 Skill Author 使用;rough compaction 给 Raw-Trajectory control 使用。作者特别说明不访问 hidden model state 或 private chain-of-thought。
Skill Author 是 host-side LLM call,与 task-solving agent 分离。它只接收 same-family skills 和 same-family acquisition history。
library 冻结后,agent 只能读取和应用 skills,不能继续修订。deployment 后再 replay 原 acquisition tasks,用来区分 local recovery 与 transfer。
| 条件 | 含义 | 它排除什么混淆 |
|---|---|---|
| No-Skill | 没有 persistent memory 或 skill library。 | base agent capability。 |
| Raw-Trajectory | 检索同 family acquisition 轨迹,不生成 skill。 | 直接 episodic reuse 是否已经足够。 |
| Curated-Static / Revision / Always | 从 gap-exposed curated skill 开始,静态或按策略修订。 | 人类初始程序知识和经验修订的贡献。 |
| SelfGen-ZeroShot / Revision / Always | 空起点或 metadata 起点,由 agent 从轨迹诱导 skill。 | agent 自己从经验形成 skill 的能力。 |
| Always+Tier3 | 强制写入或更新 scripts/、references/、assets/。 |
library 容量是否是瓶颈。 |
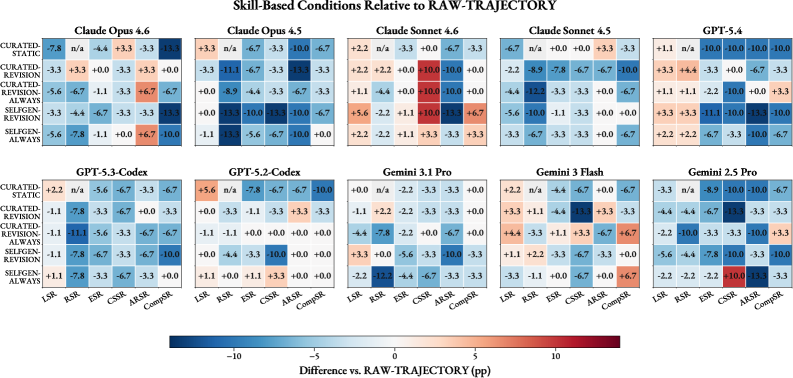
我从项目页内嵌 leaderboard 解析出十个模型的平均指标。结论很清楚: always-update 略好,但绝大多数 skill 条件没有形成稳定 deployment 优势。
| 条件 | LSR | RSR | ESR | CSSR | ARSR | CompSR | ESR 变化 |
|---|---|---|---|---|---|---|---|
| No-Skill | 40.1 | - | 34.7 | 38.3 | 43.7 | 22.0 | baseline |
| Curated-Static | 41.8 | - | 32.2 | 38.0 | 39.7 | 19.0 | -2.46 pp |
| Curated-Revision | 41.2 | 46.0 | 34.0 | 38.0 | 41.3 | 22.7 | -0.68 pp |
| Curated-Revision-Always | 40.6 | 41.8 | 35.5 | 41.0 | 40.7 | 24.7 | +0.77 pp |
| SelfGen-ZeroShot | 41.0 | - | 32.1 | 37.0 | 37.7 | 21.7 | -2.57 pp |
| SelfGen-Revision | 41.7 | 44.1 | 32.1 | 37.0 | 38.3 | 21.0 | -2.58 pp |
| SelfGen-Always | 40.8 | 43.1 | 35.1 | 40.7 | 41.0 | 23.7 | +0.44 pp |
acquisition 或 replay 变好不代表 skill 真可复用。论文中多个模型在 LSR/RSR 上涨,但 ESR、CSSR 或 CompSR 下降。
context-shift、adversarial robustness、composition 暴露的是不同 failure mode。单一 success rate 会把 missed invocation、shortcut reliance 和 weak modularity 混在一起。
Opus 4.5、GPT-5.4 等模型更容易从 procedural memory 获益;Gemini 2.5 Pro 在多数 memory variants 下反而受损。
这是论文最刺痛当前 agent memory 方法的结果:如果 skill abstraction 真保留了可复用程序, distilled skills 应该至少不输直接轨迹复用;但实验中不是这样。
我的判断:这不是“总结写得不够长”的问题,而是 selective procedural abstraction 的问题。 当前 agent 不稳定地知道哪些 execution details 是未来程序的一部分,哪些只是当前 episode 的噪声。
| 现象 | 例子 | 解释 |
|---|---|---|
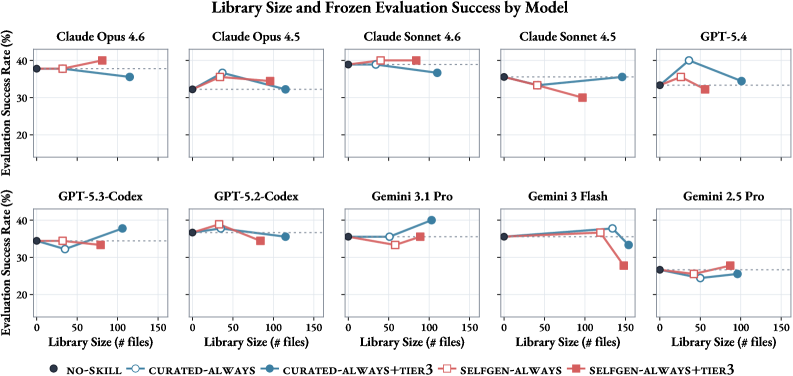
| 资源文件有时有用 | Claude Opus 4.6 在 SelfGen-Always+Tier3 中 ESR 从 37.8% 到 40.0%。 | 某些脚本、模板、参考确实能保存 compact SKILL.md 放不下的稳定程序。 |
| 容量也会伤害 | Gemini 3 Flash 的 SelfGen-Always+Tier3 ESR 从 No-Skill 35.6% 掉到 27.8%。 | 额外资源可能变成 stale context、过拟合 validator 或弱触发文件,增加检索和判断负担。 |
| Always update 不单调 | Self-generated Always 平均略好,但也会降低部分模型或指标。 | 更多写入提高 coverage,也增加 episode-specific drift。 |
这篇论文不是给出一个最终算法,而是给 skill 系统设计提供了很明确的失败清单。
更合理的架构是双层记忆:skill library 保存稳定 procedure,episodic trace memory 保存具体执行证据。 未来 agent 用 skill 做骨架,用 trace 还原局部上下文。
比起“validate input before using it”,更有用的是“merge 前检查 dtype、case、unmatched keys; merge 后 assert row count 和 critical NaN”。技能的核心是可执行检查点。
每次任务都可以提取 candidate lesson,但只有 stable、repeated、verifier-backed、future-triggerable 的内容才应该进入 skill body。
真实系统需要 skill retirement、duplicate merge、trigger collision check、usage audit、stale resource detection 和 skill-level regression tests。
一个实用 checklist:写清触发条件;写具体流程;保留失败线索;写验证方法;区分稳定程序和局部细节; Tier-3 文件必须被 SKILL.md 明确引用;修订后问它是否能帮助未来不同上下文的任务。
SkillEvolBench 最好的地方,是它用 Raw-Trajectory control 逼所有 skill 方法面对一个朴素问题: 你提炼出的技能,为什么比原始经验更好?如果答案说不清,skill 很可能只是看起来更干净的 lossy compression。
当前 agent 的核心瓶颈不是“不会总结”,而是“不知道哪些执行细节是未来程序的一部分”。 很多命令、schema 检查、异常路径、失败尝试和 verifier 诊断,在摘要时看像局部噪声, 但在 deployment 的 context shift 或 adversarial task 里恰好是关键线索。
所以我会把这篇论文当作 agent skill system 的评测框架,而不是只当 benchmark 榜单。 后续真正有价值的方向,是 trace-to-skill loss analysis、skill trigger evaluation、skill regression tests 和 hybrid skill+trace retrieval。
本报告以 arXiv 论文、项目主页、Hugging Face Paper 页面和 Hugging Face Dataset 为主证据。 dataset parquet 中包含 30 个 skills 与 180 个 tasks 的结构。
skillevolbench.github.io 页面和内嵌 leaderboard 数据;Paper 链接可用,Code/Data 按钮当前在页面 HTML 中仍是占位 #。
skillevolbench/skillevolbench 可访问,包含 skills 与 tasks 两个 config;核验 skills=30、tasks=180。